
座標系
このドキュメントでは、3Dモデルの配置に関連する座標系について説明します。
表記について
このドキュメントでは、\((x, y, z)\)が(赤, 緑, 青)に対応するように記述します。
1. モデルの表示に関連する座標系
1.1. 各種3Dモデルエディタでの座標系
各種3Dモデルエディタごとに、x軸、y軸、z軸の向いている方向は異なります。
例としてBlenderでは、通常下記のように正面が -y軸 方向となるようにモデルを作成します。
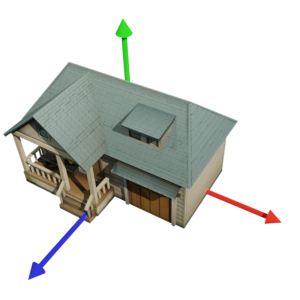
1.2. glTF座標系
Maprayでは3Dモデルのファイル形式として glTF形式 を読み込むことができます。
glTFの座標系は Y Up (y軸が上方向)で出力されることが多く、Maprayでもこの座標系で出力されていることを前提に処理を行います。
出力されたファイルでは、下図のようにy軸が高さ方向、z軸が正面となるような座標系となります(正面である必要はありませんが本文書では正面とします)。
1.3. Maprayでの表示方向
下図は上記モデルをMaprayで読み込んだ結果です。 外側・内側の座標系が表示されていますが、外側に表示されている座標系が上記glTFモデルの座標系です。 Roll, Tilt Headingなど、姿勢を制御するパラメータを指定しない場合、3Dモデルは図のような方向に配置されます。 y軸が高さ方向、z軸が北方向、x軸が西方向を向いています(3Dモデルの正面が北を向くことになります)。
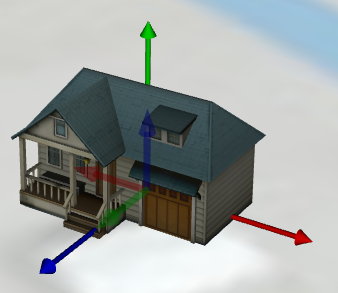
Maprayでは、3Dモデルの方向をMaprayローカル座標系(上図中の内側の座標系)で管理します。
1.4. 3Dモデルの座標変換
Maprayで表現される3Dモデルは、Maprayローカル座標系への変換行列\(T_\mathrm{MLOCS}\)及び、姿勢変換行列\(T_\mathrm{attitude}\)が適用されます。 全体を通した変換行列\(T_\mathrm{all}\)は下記のようになります。
\begin{equation} T_\mathrm{all} = T_\mathrm{MLOCS} T_\mathrm{attitude} \end{equation}モデルに含まれる点\(\vec{p}_m\)と実際に表示される位置\(\vec{p}_g\)の関係は下記のように計算されます。
\begin{equation} \vec{p}_g = T_\mathrm{all} \vec{p}_m \end{equation}1.5. Maprayローカル座標系及び姿勢変換
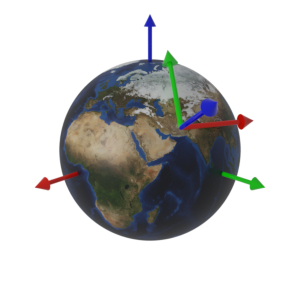
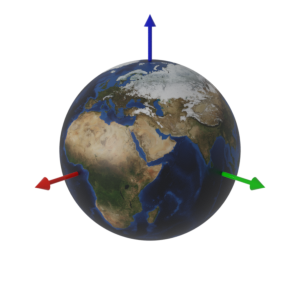
Maprayローカル座標系\(T_\mathrm{MLOCS}\)は下記のように定義されます。
- 地球上の任意の点\(p_o\)を原点とする
- z軸を上方向(地球中心と反対方向)
- y軸を北方向(z軸に垂直)
- 右手系で残りの軸をx軸とする
コーディングについて、mapray.ModelEntity#setPosition() を用いて \(p_o\) を指定すると、 自動的にMaprayローカル座標系が適用されるようになります。
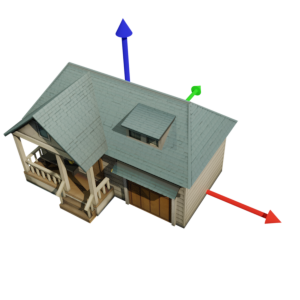
姿勢変換\(T_\mathrm{attitude}\)は上記座標系へ配置された後で適用されます。 現在のバージョンでは Heading, Tilt, Roll でモデルの姿勢変換を行います。 下図は、Maprayローカル座標系、Heading, Tilt, Rollで回転する方向を示します。(比較のためglTF座標系で回転する方向も示します)
| Maprayローカル座標系 | glTF座標系 | |
|---|---|---|
 |
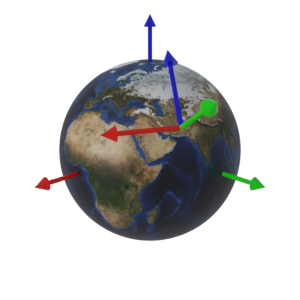 |
|
| Heading | +z軸側から中心を見て時計回り | +y軸側から中心を見て時計回り |
| Tilt | +x軸側から中心を見て時計回り | +x軸側から中心を見て反時計回り |
| Roll | +y軸側から中心を見て時計回り | +z軸側から中心を見て時計回り |
コーディングについて、 mapray.ModelEntity#setOrientation() を用いて姿勢情報を指定します。 姿勢情報は mapray.Orientation クラスを用いて表現します。
1.6. 姿勢変換の行列計算
姿勢変換\(T_\mathrm{attitude}\)の詳細な座標変換について説明します。
拡大を示す行列。
\begin{equation} S = \begin{pmatrix} s_x & 0 & 0 & 0 \\ 0 & s_y & 0 & 0 \\ 0 & 0 & s_z & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix} \end{equation}+x軸側から中心を見て\(\theta\)時計回りする回転行列。
\begin{equation} R_x(\theta) = \begin{pmatrix} 1 & 0 & 0 & 0 \\ 0 & \cos\theta & \sin\theta & 0 \\ 0 & -\sin\theta & \cos\theta & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix} \end{equation}+y軸側から中心を見て\(\theta\)時計回りする回転行列。
\begin{equation} R_y(\theta) = \begin{pmatrix} \cos\theta & 0 & -\sin\theta & 0 \\ 0 & 1 & 0 & 0 \\ \sin\theta & 0 & \cos\theta & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix} \end{equation}+z軸側から中心を見て\(\theta\)時計回りする回転行列。
\begin{equation} R_z(\theta) = \begin{pmatrix} \cos\theta & \sin\theta & 0 & 0 \\ -\sin\theta & \cos\theta & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix} \end{equation}モデルに対し、下記の順番で演算を行います。

姿勢変換行列 \(T_\mathrm{att}\) は下記のようになります。
\begin{equation} \begin{aligned} T_\mathrm{att} &= R_z(H) \times R_x(T) \times R_y(R) \times S \\ &= \scriptsize \begin{pmatrix} s_x(\sin{R} \sin{T} \sin{H} + \cos{R} \cos{H}) & s_y\cos{T}\sin{H} & s_z (\cos{R} \sin{T} \sin{H} - \sin{R} \cos{H}) & 0 \\ s_x (\sin{R} \sin{T} \cos{H} - \cos{R} \sin{H}) & s_y \cos{T} \cos{H} & s_z (\cos{R} \sin{T} \cos{H} + \sin{R} \sin{H}) & 0 \\ s_x \sin{R} \cos{T} & -s_y \sin{T} & s_z \cos{R} \cos{T} & 0 \\ 0 & 0 & 0 & 1 \\ \end{pmatrix} \end{aligned} \end{equation}コーディングについて、 mapray.ModelEntity#setOrientation() を用いて姿勢情報を指定すると、 上記行列式が自動的に計算されるようになっています。
2. 基本演算
2.1. ベクトル
Maprayでは GeoMath.createVector3 を用いてベクトルを生成します。
const p = GeoMath.createVector3(); // p = [px, py, pz]
2.2. 行列
Maprayでは GeoMath.createMatrix を用いて行列を生成します。
const m = GeoMath.createMatrix(); // m = [m00, m10, m20, m30, m01, m11, m21, m31, m01, m12, m22, m32, m03, m13, m23, m33]
配列で保存される順番にご注意ください。
2.3. 座標値を行列変換
const p = GeoMath.createVector3(); const m = GeoMath.createMatrix(); // p, mに任意の変数を指定する const result = GeoMath.createVector3([ m[0]*p[0] + m[4]*p[1] + m[ 8]*p[2] + m[12], m[1]*p[0] + m[5]*p[1] + m[ 9]*p[2] + m[13], m[2]*p[0] + m[6]*p[1] + m[10]*p[2] + m[14] ]);
2.4. 逆行列
const m = GeoMath.createMatrix(); // p, mに任意の変数を指定する m2 = GeoMath.inverse_A(m, GeoMath.createMatrix());
3. 座標系
3.1. GOCS座標系
地球中心を原点とする直行座標系
3.2. 緯度・経度座標系
3.3. Maprayローカル座標系
任意の点を原点とする直行座標系
下記のように定義されます。
- 地球上の任意の点\(p_o\)を原点とする
- z軸を上方向(地球中心と反対方向)
- y軸を北方向(z軸に垂直)
- 右手系で残りの軸をx軸とする
この変換行列は、mapray.GeoPoint#getMlocsToGocsMatrix() から取得することができます。